

要說近年汽車行業的大熱點,那一定要數自動駕駛技術的開發及應用。無數的主機廠供應商甚至不少初創企業都對這塊蛋糕虎視眈眈,對于這項技術,老牌車企如大眾豐田似乎還比較保守,只是在自家的頂配車型中進行匹配,作為拔高車系形象或是展示技術實力的作用,而自主品牌則已經將其標配到了各級別的車型中。
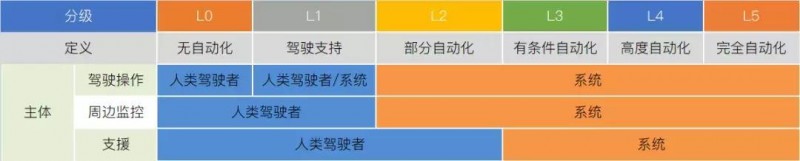
目前,國內裝車匹配的多數是LV2級別的輔助智能駕駛,即非復雜工況下的輔助智能駕駛。
主流的LV2級別的輔助智能駕駛功能一般包含AEB自動緊急制動、FCW碰撞預警、ACC自適應巡航、LKA車道保持、LDW車道偏離預警、BSD盲區監測等功能,雖然各個主機廠為了宣傳命名不同,但是功能都大同小異。輔助智能駕駛的供應商國內主要為博世、大陸、奧托立夫等,其中博世的市場占有率較高,但是由于輔助智能駕駛涉及動力ECU\TCU標定、轉向EPS標定,整個開發過程很考驗整車廠的匹配能力,因此即便使用同一家輔助智能駕駛系統供應商,但主機廠匹配能力不同會得出截然不同的結果,所以輔助智能駕駛系統表現的好壞也是車企開發能力的體現。
這次我們選取比較主流的四家自主車企的車型——吉利繽越、傳祺GS5、WEY VV7、寶駿RS-5,來對比它們在輔助智能駕駛領域的功能及效果,這四款車型均匹配了1R1V(攝像頭+雷達)的硬件方案。供應商方面,傳祺GS5、WEY VV7、寶駿RS-5是由博世提供,而繽越采用了奧托立夫作為其供應商,下面我們從最主要的ACC自適應巡航、LKA車道保持兩個功能入手來一窺究竟。

ACC自適應巡航功能對比
我們先來聊聊最常用的ACC自適應巡航功能,簡單來說這項功能就是車輛縱向的自動控制。以下我們按速度段來評價各家ACC系統表現的優劣。
【0~20km/h速度段】
LV2級別的輔助智能駕駛都具備跟停/跟起功能,即車輛可以跟隨前車停車和起步。
在這一速度段的起步,傳祺GS5的表現相對更好,得益于AT變速箱液力變矩器的優勢,起步過程穩定迅速,低速跟車時速度保持穩定,不存在大幅度上下波動;
吉利繽越和寶駿RS-5表現則中規中矩,繽越的起步速度不如GS5,起步過程會存在一些輕微震動,寶駿RS-5的問題同樣在起步上,雖然起步的平順性不存在問題,但是起步加速較慢,導致跟前車距離會拉開較大一段“引誘”相鄰車道車輛加塞進入,而在低速跟隨中兩車的速度穩定表現都不錯,跟GS5不相上下;
在低速段表現稍差的是VV7,起步較遲緩,離合結合過程會偶發性出現比較明顯的頓挫感,速度的維持也不太穩定,上下的撥動范圍正負3km/h,能感覺到與前車距離忽遠忽近。
20 ~0 km/h跟隨停車這個項目上,考驗的是ESP建壓制動的控制,其中吉利繽越、傳祺GS5的表現相對優秀,制動力輸出線性,跟停的距離也比較符合駕駛員的設想。而WEY VV7與RS-5則相對弱一些,VV7在跟停過程中時有出現制動后又松開而后再次制動的情況,車內乘員感受較為一般,降低了體驗;而寶駿RS-5則是在跟停過程中能較為明顯聽到ESP建立壓力工作的噠噠聲,相比其余車型比較輕微的噪音遜色一籌。
【20~80km/h速度段】
這一速度段主要是城市快速路和高架使用場景,車況比較復雜,ACC目標車輛無法長期穩定跟隨,經常有切入切出的情況,這里考驗的是系統對目標的識別情況以及加減速曲線的調整。
這個速度段最佳表現則是屬于RS-5,在加速過程中得益于CVT的平順特性,加速度基本維持在一個定值,不存在換擋等影響。而在低速跟車后前車離開時,RS-5的加速度不是立刻設定為目標值,而是會有一個曲線的遞增過程。此外RS-5在減速方面同樣出色,前車切入時減速度的發送也非常線性平穩,既不像一個莽撞的新手立刻猛踩剎車,也不像自以為是的老司機很晚才用大力制動避免碰撞。同時這個速度段經常會在行駛中遇到靜止等待紅燈或避讓行人的車輛,此時RS-5對于靜止目標的識別準確率驚人,基本不存在不能識別的情況。
其余三臺測試車輛則由于有擋位存在,加速時會出現換擋導致加速度的波動,而且在某些特定速度下(正好處于換擋線上下時),還會出現擋位的反復變更導致的頓挫。另外繽越和VV7的加速不知道是由于目標出現丟失還是ECU匹配問題,會經常性出現加速度突然增大而后又恢復正常的現象。
【80~120km/h速度段】
此速度段基本為高速巡航,也是ACC最初出現時使用最頻繁的工況,在這個速度段下這四部車的ACC表現都能滿足需求,跟車穩定,過彎也不會丟失目標,上下坡對于速度的影響微乎其微,由于基本使用最高擋位或次高擋位,換擋次數和對行駛影響也大大減小。
小結:綜合來看,車輛動力系統的硬件因素會對ACC性能表現形成很大的影響,而由于ACC的加速度和減速度相比動力總成或制動系統的絕對能力都相差甚遠,所以這里更多要求的是平順。寶駿RS-5由于占了CVT這一大便宜,綜合表現更優秀,而VV7則受其DCT變速箱特性的拖累導致了整體體驗相對差一些。
LKA車道保持系統對比
LV2級別另一大關鍵的輔助智能駕駛系統便是LKA車道保持系統,甚至可以說這項性能的表現決定了車輛整體智能輔助駕控感受的差別。LKA系統主要負責車輛的橫向控制,將車輛在直線或是彎道中保持在車道中間行駛,而彎道曲率不同、入彎速度不同、甚至路面的傾斜狀況、破損情況都會影響到LKA在彎道表現,所以LKA的調試要比ACC復雜許多。
TIPS:LKA過彎的力度一般是由兩部分組成,前饋與反饋,前饋是指攝像頭通過識別彎道曲率計算得出的過彎所需的力,反饋則是根據偏離量計算得出的力,兩個力相加形成了系統最終的力值。反饋力的計算則是通過比例、積分、微分計算得到的,并不是一個簡單的比例關系。
不同的調試者會使用不同的前饋、反饋的比例,那么我們接下來就一一介紹(VV7測試車輛由于四輪定位問題未進行評價)。
【傳祺GS5】
此車LKA的調試風格以反饋為主,前饋力占比較低、反饋占比較大,這種調試的風格保證了車輛過彎的能力。因為前饋的計算并沒有包含地形、風向等因素,所以一般不能完全保證過彎,而較高的反饋配比可以時時修正,不過這也導致了另外一個問題,過彎時候修正很多,不是非常穩定線性,感覺是一個還未完全掌握技巧的新手在不斷地調整方向。同時由于反饋力較大,在入彎和出彎的過程中軌跡常常出現與中心線較大的偏差,因此偶爾有打方向較猛的情況。
綜上,傳祺GS5的LKA系統比較適合的工況是需要頻繁修正軌跡的城市高速環道,由于高速環道的建設受地形限制,彎道經常是變曲率半徑彎,需要頻繁修正方向適應道路,GS5的修正過程力道充足,能保證車輛不會再彎道偏離中心,維持軌跡的穩定。
【吉利繽越】
吉利繽越和傳祺GS5則是完全不同的方向,繽越的方向盤上明顯有一個很持續的力,這是LKA系統前饋較高的特征,帶給駕駛者的感受就是,入彎、出彎力很持續,不容易出現突兀的猛打方向。當然這種設定也有弊端,車輛的軌跡控制就會變得更為艱難,彎道中會出現蛇形走位。而繽越比較適應的路況是高速公路——高速修建比較規整,彎道的曲率穩定,前饋提供的力度就比較精準,過彎中偏差非常小,基本不需要反饋修正。
【寶駿RS-5】
寶駿則是吸取了前輩的經驗,走了比較折中的路線——前饋、反饋配比比較適中,入彎、出彎沒有明顯的突兀發力的感覺,力道比較持續,彎道中的軌跡控制表現也是很優秀的。不過我在試駕中發現寶駿RS-5的LKA系統抗干擾的能力稍弱,如果在彎道中有比較明顯的起伏路或大坑沖擊,過彎的感受就會明顯下降,車輛在受到沖擊之后軌跡偏離得比較明顯,導致LKA修正就明顯增大——而這雖然是EPS調試導致的,但是對LKA系統的影響較大。
總結:我個人對于LKA系統的理解仍然將其視為輔助駕駛,而在系統運行過程不能讓駕駛者產生擔憂,目前對于LV2的LKA系統要求,我認為應該著重放在高速工況上,城市使用LKA系統的還是非常稀少。所以從這個角度來說我更喜歡吉利繽越和寶駿RS-5的表現,雖然這兩臺車的LKA都有各自的缺點,但是它們大部分時候的表現更像一個老司機在替你駕駛,而且高速的表現更平順穩定;傳祺GS5雖然在過彎能力上更勝一籌,但是并不能讓我放心的把駕駛權交給它。
總結:
LV2的輔助智能駕駛能讓人有種觸摸未來的感覺,當車輛自己跟隨行駛、自動轉向,會帶來未來已至的快感,但是你也能明顯感覺到其目前的局限——在某些工況下的表現還是不能達到預期。
我個人更喜歡那些以用戶體驗為基礎調試出來的輔助智能駕駛系統,而其中,吉利和寶駿的表現更讓我刮目相看。



